산림청 국립산림과학원(院长金容宽)表示, 正在开发利用人工智能(AI)的自动驾驶森林作业机器人,并推进研究以加强其现场适用性。
该技术是“森林领域灾害应对型研究开发”项目的一部分,开发了结合GNSS(全球导航卫星系统)和INS(惯性导航系统)的综合导航系统基础的自动驾驶林业机器人,并附加应用了基于AI的深度学习技术。
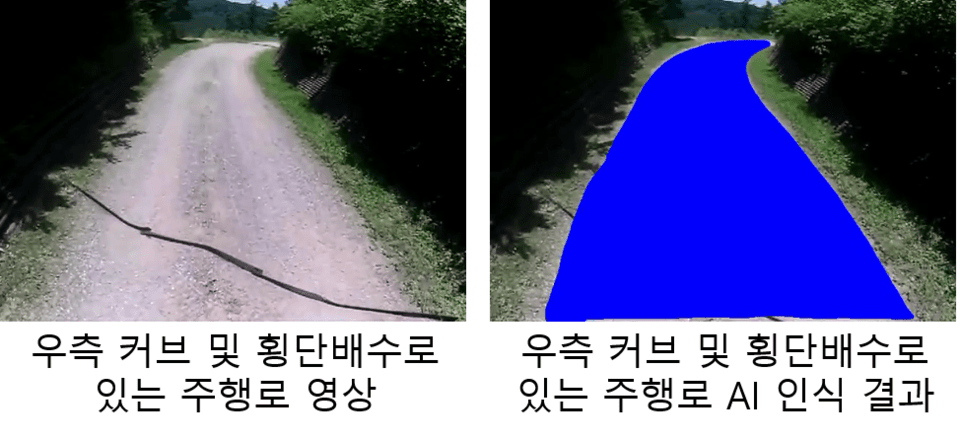
深度学习技术通过视觉传感器收集的行驶路线影像信息进行学习,以补充自动驾驶过程中可能发生的位置误差。这确保了即便在森林环境中也能自主识别行驶路线,并提取路径中心线以实现实际行驶,这一点已通过现场测试得以验证。
此次开发的AI技术为直接搭载于机器人上并运行的结构,可独立运行,无需额外的网络或云连接。因此,可稳定应用于森林作业现场的机器人和机械设备。

国立森林科学院森林技术管理研究所博士吴在宪表示:“基于搭载AI的自动驾驶技术不仅适用于无人型森林作业机器人,还适用于现有的林业机械。今后将与传感器融合技术相结合,以提高森林作业的安全性和效率。”